之前的文章介绍了mio的数据结构模型,但是它只是定义了I/O复用的模型,主要是负责I/O端口上的读写事件监听,但真正的读(recv)和写(send)并不是由mio完成,读写的分析逻辑涉及到协议,因此jabberd2中这项任务交给了sx模块完成,源码中没有看到对sx这两个字母做出的解释,光看源码的sx目录很难看出这个模块到底具体的职责,关于它日后再说.对于mio来说, 可以把sx看成是读写的执行体, 读取到xml片段怎么分析, 要写什么内容来回复,都由sx完成.
关于如何调试jabberd2已经讲过, jabberd2将整个服务器交给了4个进程模块来执行,或许这个原因, 作者在模块中没有用多线程,靠一个主线程完成全部工作.所以整个架构里充满了函数回调,而一个回调函数可能在各种不同的情况下被调用,因此代码的修改上必须小心翼翼,这或许又使其扩展性受到了极大地约束,看这类代码非常费劲.毫无例外地, mio和sx的配合过程也是靠回调完成.
其实从callback函数的命名上可以看出它的由来,第一个单词(c2s)指明了所属的进程模块,第二个单词(router)表示这个函数承载的通信对象,第三个单词(mio)表示了调用这个回调函数的触发者,最后一个callback顾名思义了.因此c2s_router_mio_callback表明的是c2s模块里和router交互的mio模型回调函数,在jabberd2架构里这类回调函数通常都是注册在第三个单词(这里即mio)的实体中,由其触发.一个mio_callback可以管理一类对象的通信,针对router的交互注册的是c2s_router_sx_callback,针对客户端发起的请求注册的是_c2s_client_mio_callback,这些函数都在c2s.c中.
前面说到,mio不负责具体的读写操作,因此这里又引入了sx模块的回调,针对每一个(文件描述符FD)连接通信,mio_callback都会调用与其对应的sx_callback.c2s_router_sx_callback对应于c2s_router_mio_callback,后者(mio)的读取请求操作都发给前者(sx),由于router和c2s是一对一的关系,所以进入这两个回调的连接句柄FD都是同一个,因此相对比较容易调试和理解,下图也以此为例解释.而一个c2s建立的服务端对应N个客户端,所以client_mio_callback会针对不同连接做出不同client_sx_callback调用请求.下图是以c2s和router建立连接的过程来表示.
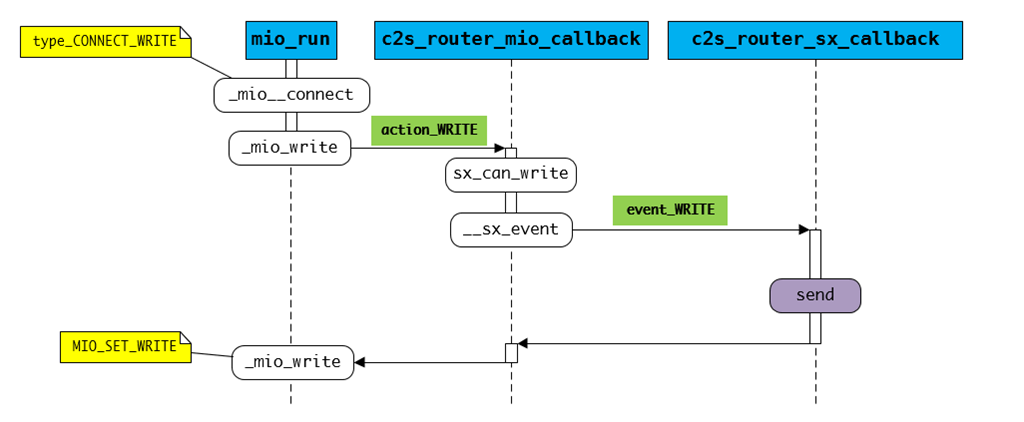
在进入while循环前首先要建立起与router的连接(_c2s_router_connect),while循环靠mio_run来驱动.在进入循环前,FD(m,fd)->type已被设成type_CONNECT_WRITE,表示首次建立连接并希望写入数据.这里要指出一点, 从_mio_read和_mio_write的区别可以看出来由于采用的是Reactor模式, _mio_read实际上是延时读,_mio_write是即时写.
1 | /** start processing read events */ |
实际的读操作要等待到下一轮FD轮询时才会执行,所以这里以_mio__connect来说明,此时希望写入:
1 | /** internally change a connecting socket to a normal one */ |
接下来其实就是函数回调了, 没什么特殊的
1 | int c2s_router_mio_callback(mio_t m, mio_action_t a, mio_fd_t fd, void *data, void *arg) { |
跟踪它代码后发现,与router建立连接后才建立起监听服务端,而且还会再监听一个FIFO文件管道,代码在c2s/pbx.c 和c2s/pbx_commands.c里, 看上去是用来控制jid账户的小trick, 同样也有mio回调.
总结, 回调很多, 很难一时间就看出来作者的回调分支里的种种意图, 继续学习.